The Controller (LUC)
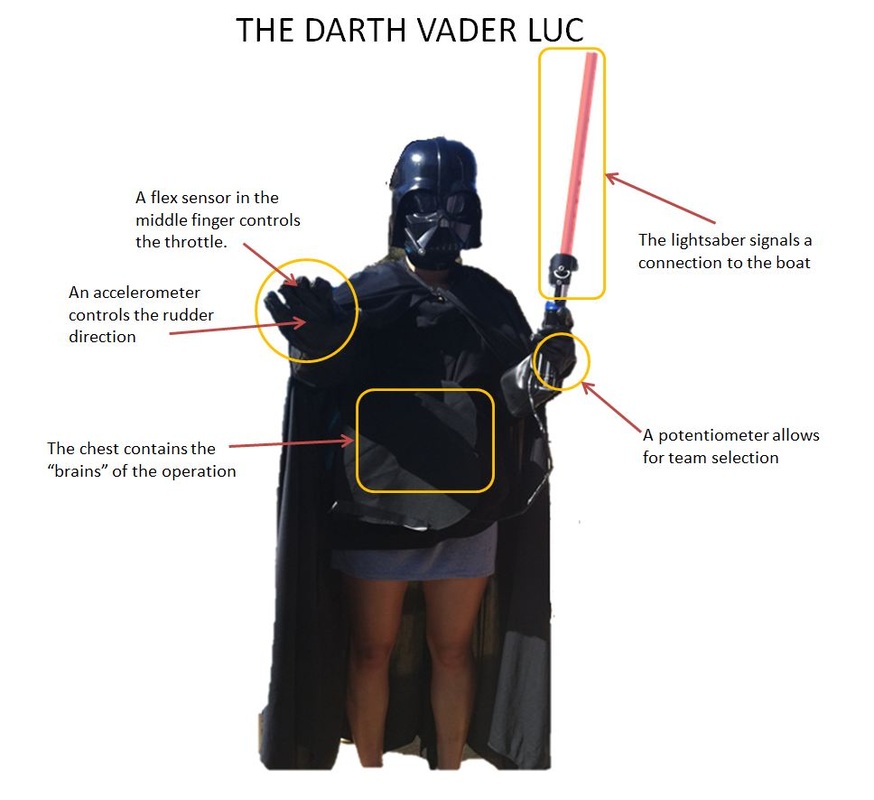
Diagram of our LUC
In order to drive our starfighter, you must join the dark side! One must become the dark Lord Vader and use the force to control the boat. The controller is made up of several components. The brains of the controller are located on the chest plate where the core of "the force," a 9S12E128 (E128) microprocessor, controls all of the various sensors and inputs. From there the user controls the boat by using Darth Vader's gloves. In the left glove, a potentiometer allows the user to select the desired vehicle. Once you are connected, the lightsaber will turn a fiery red. The right glove contains a flex sensor and an accelerometer that senses a change in the Y direction. If you begin to choke our starfighter, the boat will stop. If you release, the throttle will increase. As you rotate your hand side to side, the rudder will correspondingly move left to right. To pop a balloon, you must slice your lightsaber which contains a proximity sensor.
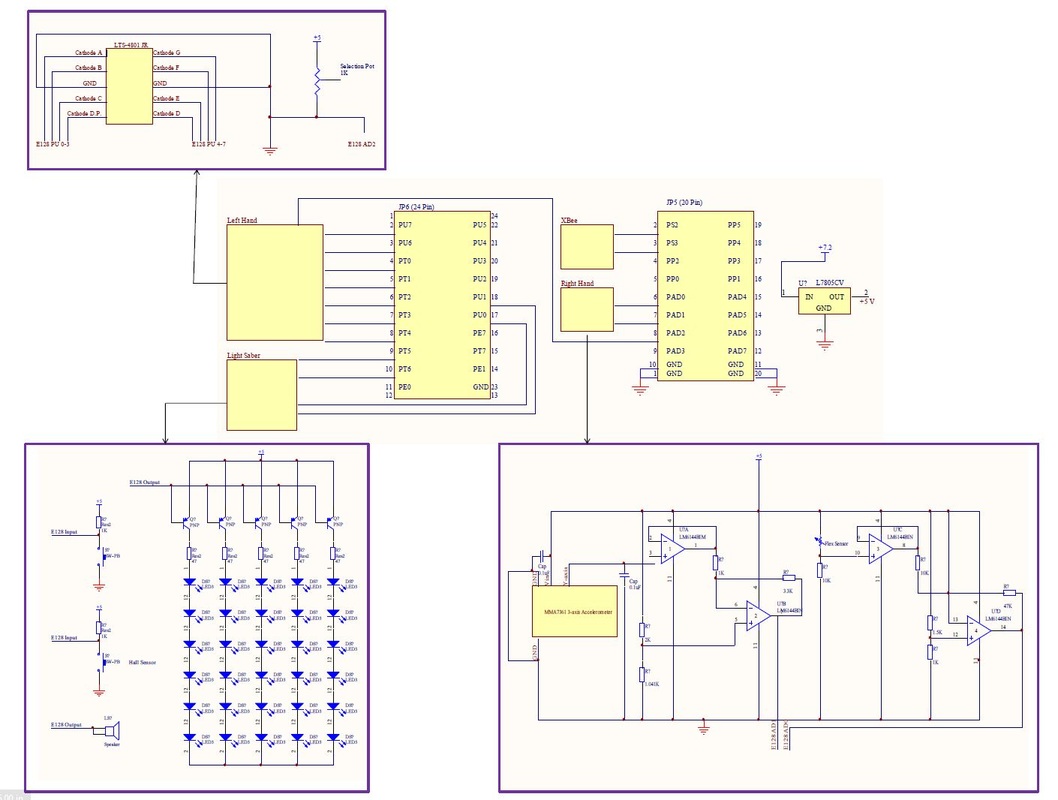
Schematic of the LUC circuits
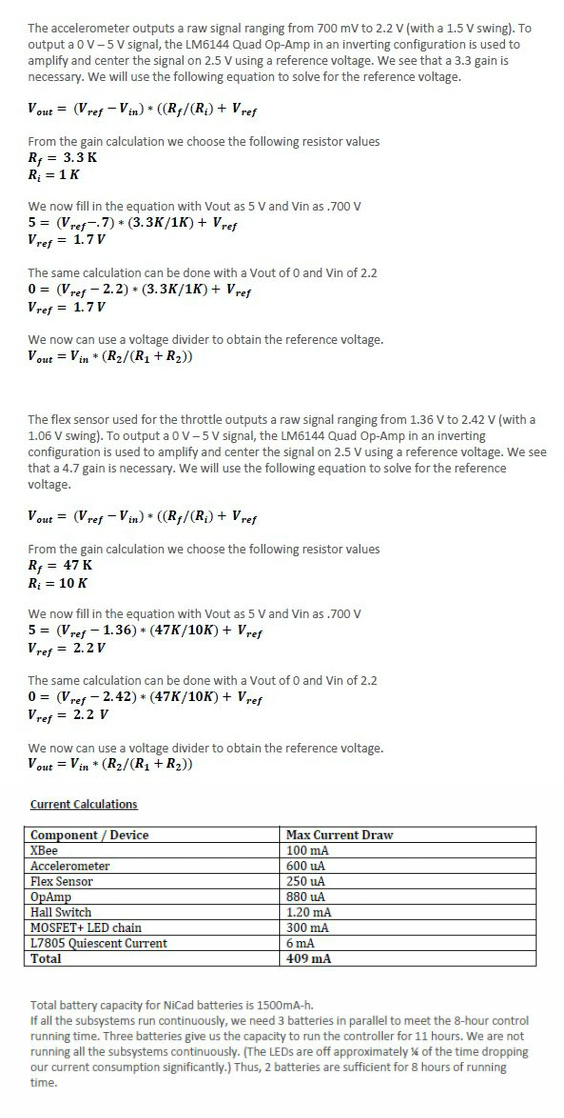
| signal_calcs.docx |
The Darth Vadar Starfighter (HZV)
The boat had two PIC16F690s controlling its functions. One PIC was hooked up to the ESC controlling the motor, as well as the the XBee and three servos. These servos controlled our rudder, balloon popping mechanism, and the searching for connection actuation, with a forth PWM signal to control the brushless motor. The second PIC talked to the balloon monitor, which determined if we were in a zombie or human state. The electronics on the boat were powered by a 3-cell 11.1V lithium polymer battery. The full 11.1V powered the ESC, which also gave an output of 6V. The 6V was then regulated down to 5V using a LM2940 voltage regulator to each of the three servo motors.
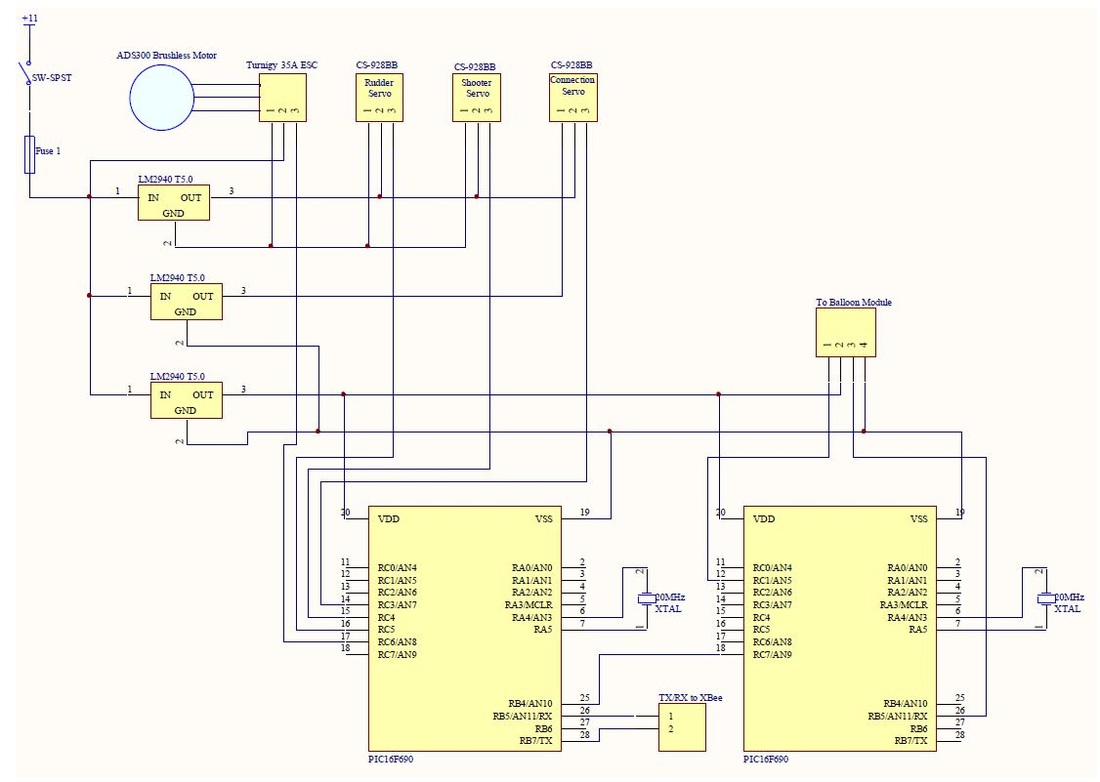
Schematic of the HZV circutis
